モビルスーツの脚の応用・その2
今回はモビルスーツの脚部の宇宙空間における運動性能の向上について考えてみます。
なお、ここでの運動性とは現用兵器に則り機体そのものを素早く移動させる為の能力のことであり、MSの人型ゆえの動作そのもののことではありません。
宇宙空間におけるモビルスーツの脚部の存在意義を見出す為に考えだされたのがAMBACであり、それは宇宙空間での運動性向上に役立ったというものでしたが、先のエントリーでそれを否定してしまいました。
では宇宙空間でモビルスーツの脚部はデッドウェイトであり白兵戦闘にしか役立たなかったのかというと、必ずしもその限りではないと考えられます。
脚部の運動性能向上への利用方法として私は今のところ2つあったと考えています。
まず1つは、その脚部の質量を利用した重心移動です。
これまでアップしたザクの絵を見ていただいてもわかりますが、モビルスーツの脚部は機体全体からみて結構な割合を占める部位です。
前回のエントリー「モビルスーツの脚の応用・その1」で書いたように、モビルスーツの脚部はかなりの強靭さと重装甲を兼ね備えています。当然その重量も機体全体から考えて相応の割合を占めているものと思われます。
ということは、この脚部を動かすだけでモビルスーツの重心位置は大きく移動することになります。
空力を無視した場合、モビルスーツに限らず推力によって飛翔する機体は機体重心が推力方向線上にあるということになります。
モビルスーツの場合は、メインスラスターと補助スラスターの複合によってこの推力方向線を機体重心上に維持していると考えるのが妥当と思われます。
この推力方向線から機体重心がズレるとそのズレた方向へ機体が回転を始めてしまいます。
複数のスラスターによる複合だとするとそれぞれのスラスターの出力を調整したり、推力偏向ノズルを使用することによって推力方向を変更することも可能ですが、機体の重心を故意に移動させることによって同じ現象を起こすことも可能となります。
両方を複合して利用することにより、より高い旋回能力を発揮させることも可能と思われます。
これは、推力方向の変更や、姿勢制御スラスターによる機体方向の変更のみに依存せざるを得ない機体よりも運動性能面において有利と言えるのではないでしょうか。
また、装備しているスラスターの中でも、より大出力のスラスターを有効に使用できるように重心位置を移動させるテクニックなどもあったと考えると面白いかもしれませんね。
2つめは、脚部にスラスターを搭載することによって、先の推力方向線を変更したり、姿勢制御スラスターとして利用するものです。
8/29のエントリー「AMBACについて」のコメント欄で少し話しているのでそちらも参照してみていただけるとありがたいのですが、姿勢制御スラスターは機体重心よりなるべく離れた位置に配置されている方がより効果的です。これはグリプス戦役の時代にはスタビライザーとして積極的に取り入れられていくことになります。
また、機体質量で脚部の占める割合が大きいので、脚部にスラスターを搭載するのは推力方向線を機体重心に乗せる上では有利でもあります。特にジオン系の機体、ザクではR型と呼ばれる高機動型では姿勢制御スラスターの機能と複合してより積極的に利用されていったと考えることができます。
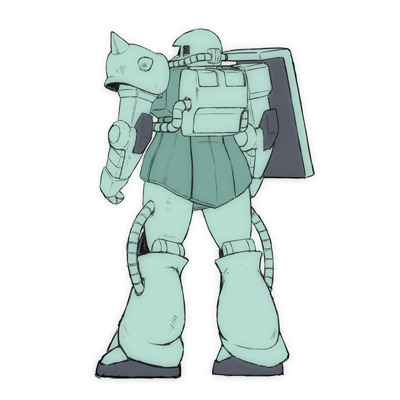
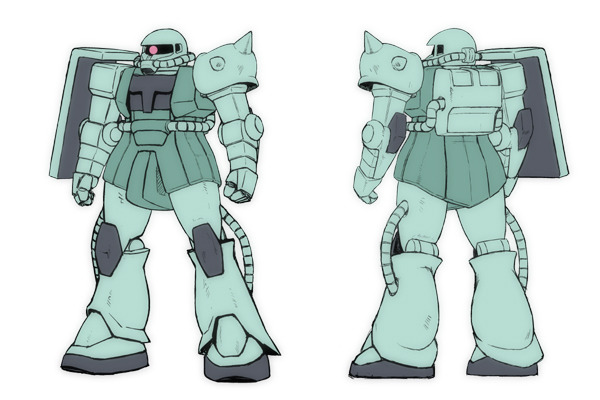
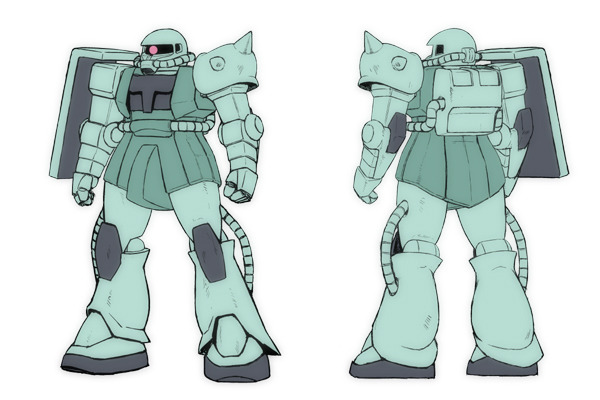
ザクの背面を整理してみました。
設定画からみるとランドセルはこれくらいのサイズだと思うのですが、大き過ぎでしょうか?
ところで設定画ではザクのランドセルのディテールはこの程度しかない訳ですが、皆さんはメインスラスターはどこにあると思っていらっしゃいますでしょうか?